
QGroundControl无人机地面控制站软件
详情介绍
QGroundControl是一款开源的地面站软件,也可以直接叫QGC地面站,用于与自动驾驶飞行器(如无人机)进行通信、控制和监视。它提供了一个直观的用户界面,允许用户通过计算机或移动设备与飞行器进行连接,并实时获取飞行器的状态信息和传感器数据。QGroundControl还具有丰富的功能,包括飞行计划编辑、飞行参数设置、航点导航、遥控器校准、实时视频传输等。用户可以通过QGroundControl来监控飞行器的状态,进行飞行任务的计划和控制,以及查看传感器数据和航迹记录。此外,QGroundControl还支持与飞行器的遥控器、地面站设备和其他系统进行通信,可以与各种飞行控制硬件和自动驾驶系统兼容,有需要的小伙伴快快下载体验吧!
软件功能
1、可以在软件配置无人机,可以对设备的飞行方案配置
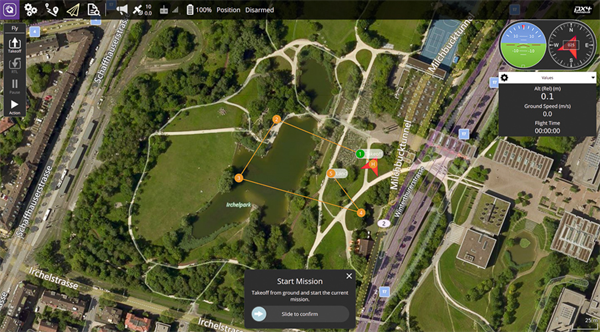
2、提供地图功能,可以在软件直接查看地面站的信息
3、可以通过这款软件将无人机拍摄的数据发送到地面站
4、可以有更好接收数据,可以更好查看无人机传输的内容
5、支持地图查看,可以将离线地图加载到软件查看航线
6、支持放大地图,航拍的地图可以在软件放大查看
7、支持对飞行的任务设置,可以通过本软件规划你的飞行任务
8、QGroundControl可以在地图上显示当前飞行的速度,可以控制飞行路线
9、支持返航设置,直接在软件上控制飞行器返航
QGroundControl亮点
1、QGroundControl可以管理多台设备,可以连接到多台无人机
2、支持静音所有音频输出,拍摄的内容可以选择静音
3、支持每次飞行后保存遥测日志,将飞行数据自动保存
4、即使飞机没有解锁也保存遥测日志
5、QGroundControl使用起飞前检查清单
6、支持配置虚拟游戏手柄,可以连接到你的手柄设备
7、自动加载任务,可以将预设的飞行任务添加到软件
8、支持下次启动时清除所有设置,更好重置新的飞行数据
9、飞行器电池低于该电量时提示30%
更新日志
v5.0.8版本
特征
Sign,Notarize and Staple Mac app bundle by @DonLakeFlyer in #13406
改进
设置自动发布说明由@DonLakeFlyer在#13407
修复
安装nsis到github windows runner由@DonLakeFlyer在#13412
修复在#13424中由@DonLakeFlyer删除的allLinksRemoved的双重信号的崩溃
Linux:修复鼠标滚轮地图缩放由@DonLakeFlyer在#13426
车辆:通过@DonLakeFlyer在#13432中修复距离传感器的FactGroup最小距离值
远程ID:关闭工具栏按钮当转到配置页面由@DonLakeFlyer在#13471
修复Android SD卡权限为API 30+(Android 11+)(#13456)由@DonLakeFlyer在#13470
修复在#13493中由@DonLakeFlyer的空CameraManager导致的车辆关闭崩溃
 赣公网安备 36010602000087号
赣公网安备 36010602000087号